
دستگاه نقطه جوش مقاومت
ارائه دهنده :محمدرضا زهرهوند
استاد راهنما :دکتر ناصر اسکندریان
توضیحات:
این دستگاه برای جوش دادن ورقههای نازک فلزی به ضخامت 2 تا 3 میلی متر کاربرد دارد. تجهیزات بکار رفته در پروژه شامل ترانس ماکروویو، کابل به طول ۱/۵ متر، سیستم خنک کننده و دو عدد الکترود می باشد. برای کار کردن با این دستگاه فقط کافیست برق 220 ولت را به قسمت ورودی ترانس داده و دو ورق فلزی را که قرار است جوش دهیم بین دو الکترود قرار دهیم و با فشار دادن اهرم دو الکترود به ورقههای فلزی فشار وارد کرده و با عبور جریان برق از آن باعث سرخ شدن دو ورق میشود . هنگامی که دو ورق فلزی سرخ شدند کافیست فشار اهرم را بیشتر کنیم و در نهایت دو ورق به یکدیگر جوش مییابند.

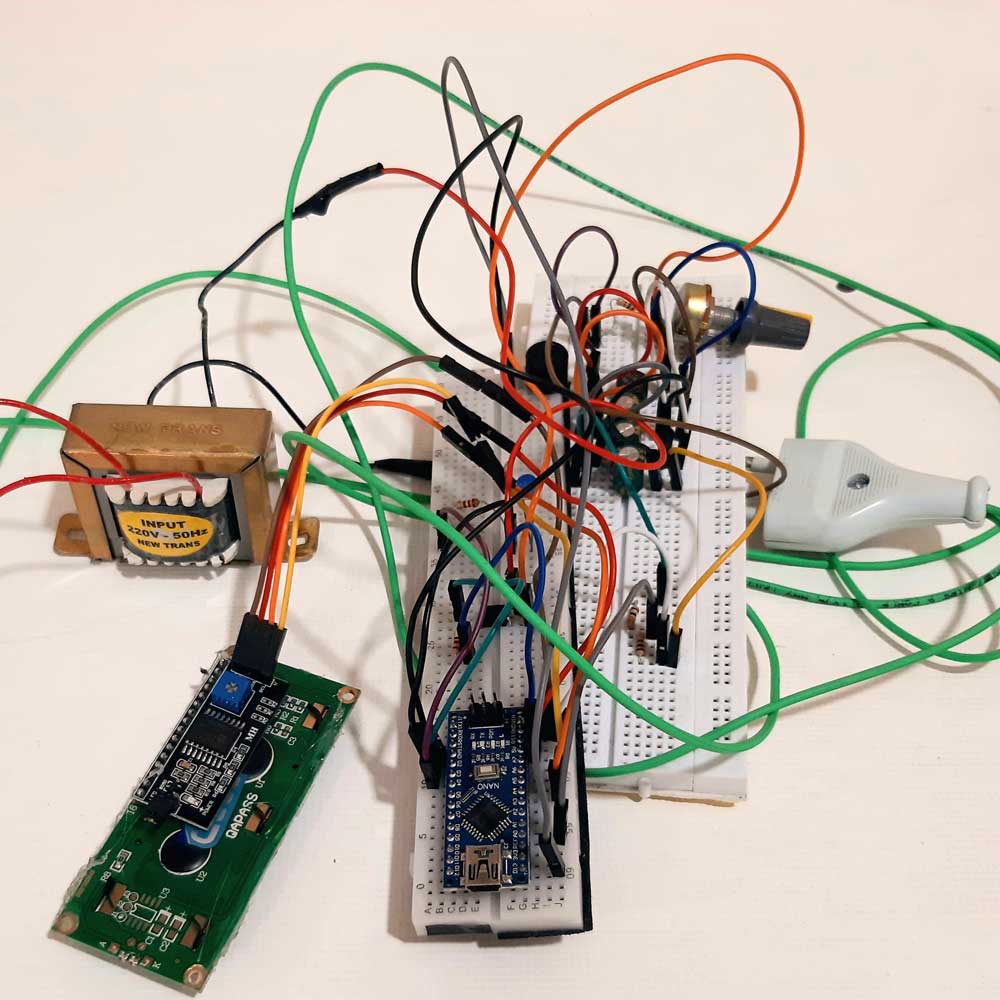
کنترل و مانیتورینگ ارتفاع و حجم مایع داخل مخزن
ارائه دهنده :لطیفه عرب کیش
استاد راهنما :دکتر سعید محمدی
توضیحات:
امروزه با پیشرفت تکنولوژی و علم الکترونیک در شاخه مهندسی برق ، مهندسان به دنبال راهکارهای عملی برای آسانتر کردن زندگی روزمره میباشند. در این خصوص پروژه کنترل و مانیتورینگ ارتفاع و حجم مایع داخل مخزن ارائه گردید. برای این منظور، با استفاده از سنسور فاصلهسنج، شیربرقی، ماژول مادون قرمز، میکروکنترلر اتمگا 32، صفحهکلید ماتریسی و یک LCD گرافیکی، داده های دریافت شده برنامه نویسی و به سنسورها ارسال گردید. در مورد کارکرد این مدار ابتدا دو بخش ادمین و کاربر را تعریف کردهایم و به عنوان دو بخش مجزا روی LCD گرافیکی نمایش میدهیم. فرد مورد نظر که قصد استفاده از این دستگاه را دارد با توجه به نیاز و خواسته خود وارد یکی از دو محیط ادمین و کاربر میشود. لازم به ذکر است که دسترسی به بخش ادمین محدود شده و برای ورود نیاز به وارد کردن رمز عبور دارد. در پنل ادمین بعد از فشردن کلید مربع و وارد کردن رمز ، کاربر میتواند تنظیمات مربوط به کنترل سطح مایع را انجام دهد. بدین صورت که ادمین طبق نیاز، سطحی را جهت پر کردن مایع برای دستگاه مشخص میکند و دستگاه با استفاده از کدهای برنامه نویسی شده به این نیاز پاسخ می-دهد. در پنل کاربر، فرد میتواند با قرار دادن لیوان در جایگاه به میزان مایع تعیین شده خود دست یابد.
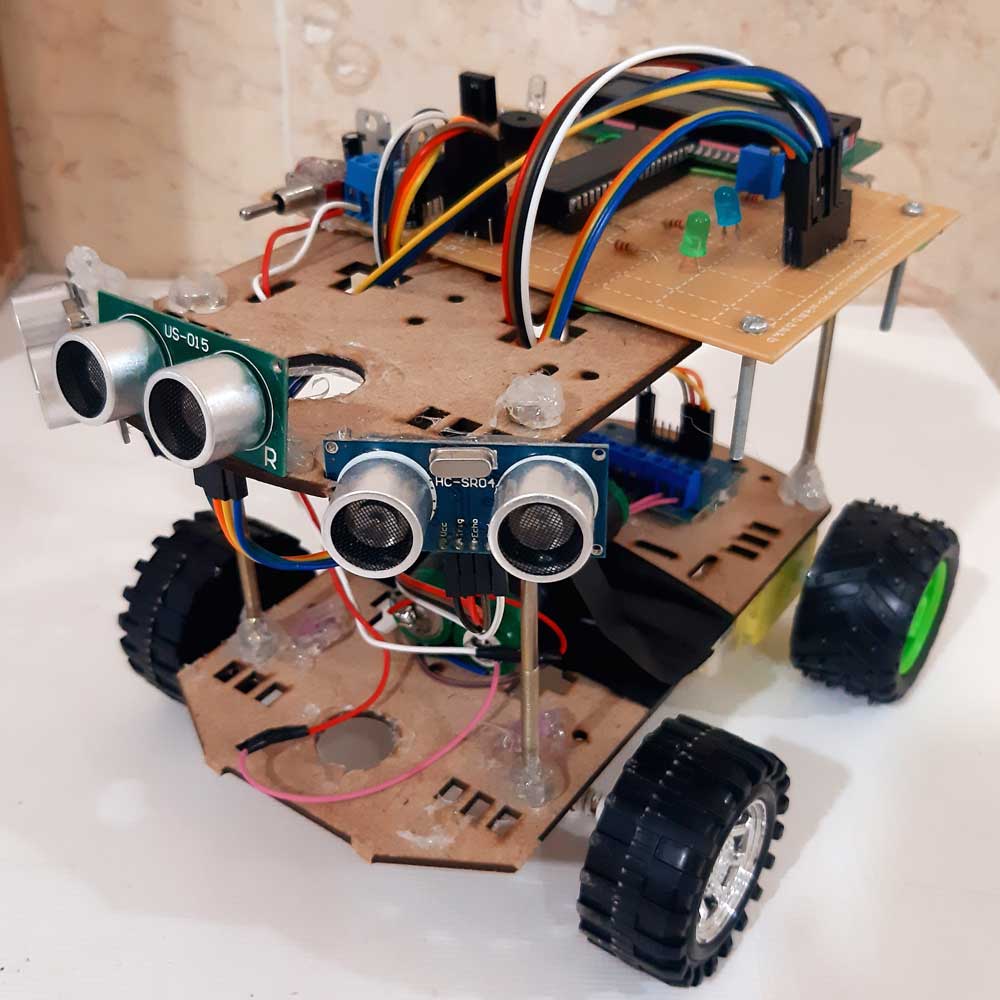
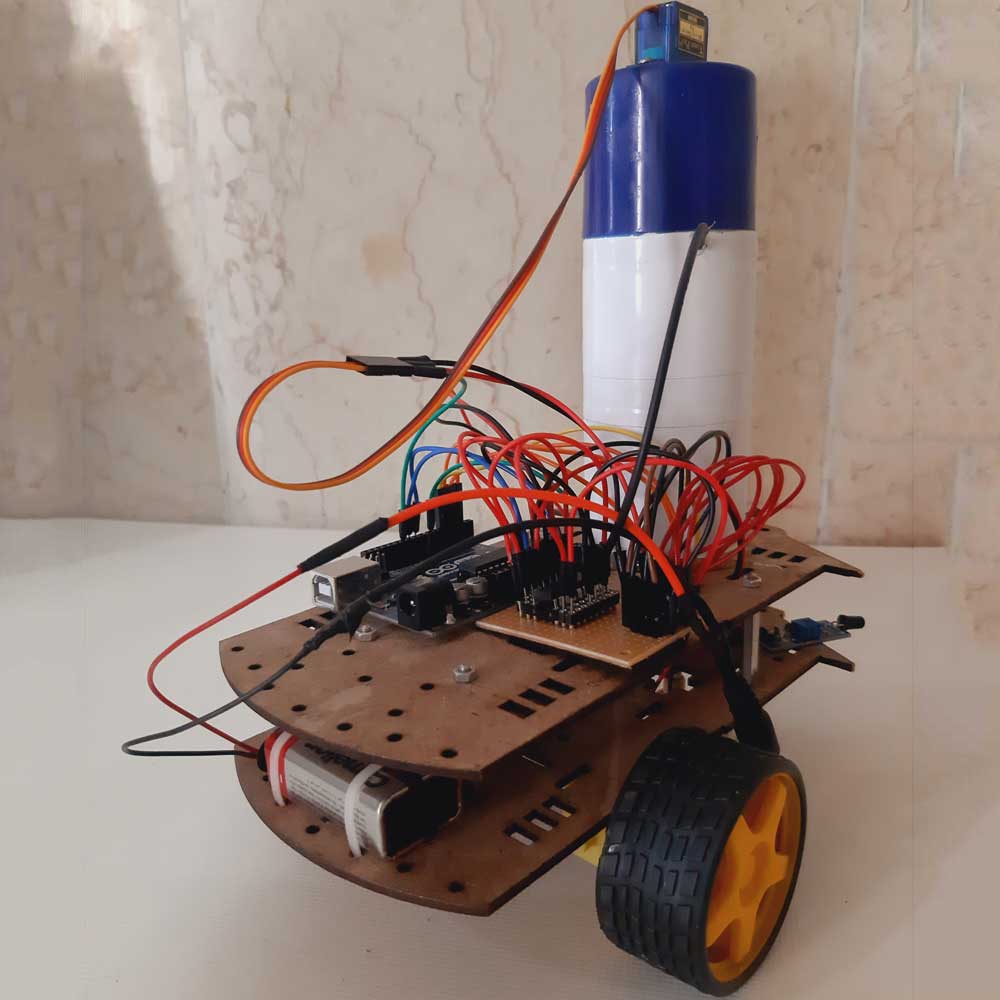
ربات مسیریاب با قابلیت تشخیص مانع و اصلاح مسیر برای افراد نابینا یا کمبینا
ارائه دهنده :حامد الماسی
استاد راهنما :دکتر علی اصغر اروجی
توضیحات:
اختلال در بینایی یک مشکل شایع در جامعه است که میتواند بهعنوان یک آسیب، زندگی فرد را محدود کند. تشخیص صحیح و سریع این اختلال میتواند به روند بهبود و درمان کمک کند. از این رو همواره پژوهشهایی انجام شده است که بر مبنای آن پزشک بتواند یک روند درمانی مناسب برای بیمار در نظر بگیرد. سنسور آلتراسونیک یکی از بهترین سنسورهای موجود برای تشخیص مانع میباشد که ارتباط ساده و دقیقی با میکروکنترلر مرکزی ربات برقرار میکند و دستور توقف، ادامه یا تغییر مسیر را به موتورهای ربات میدهد . برای بهکارگیری و پیادهسازی، دکمهی روشنایی ربات را زده و ربات بعد از 5 ثانیه شروع به حرکت در مسیر پیشرو میکند، کار سنسورهای مجاور انتخاب مسیر بهتر و درستتر برای اصلاح مسیر ربات بعد از تشخیص مانع است. پس از شناسایی مانع، ربات 2 ثانیه توقف میکند تا مسیر پیشرو را خوب آنالیز کند، سپس به عقب میرود و مسیر جدید خود را انتخاب میکند و به حرکت ادامه میدهد.
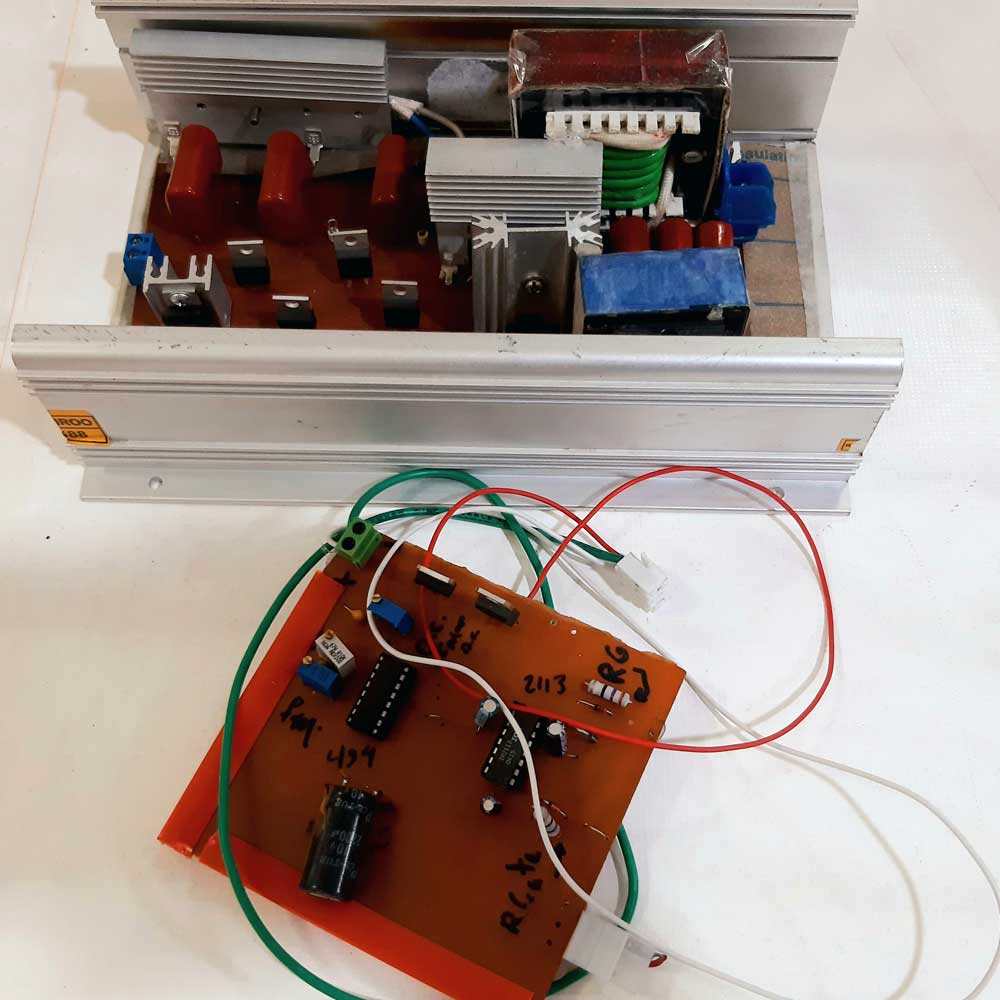
مبدل افزاینده DC-DC سوئیچینگ با نسبت تبدیل بالا
ارائه دهنده :خلیل نادعلیان
استاد راهنما :دکتر امین اصغری
توضیحات:
- این مبدل ولتاژ در خروجی سلولهای خورشیدی که دارای سطح ولتاژ پایین و معمولاً بین 30 تا 50 ولت هستند بکار گرفته میشود تا سطح ولتاژ را به مقدار موردنظر جهت استفاده در سایر تجهیزات افزایش دهد.
- در این ساختار تنش ولتاژ کلید و دیودها یک سوم ولتاژ خروجی است. همچنین ولتاژ خروجی در سیکل کاری 50 درصد، 11 برابر ولتاژ ورودی است.
- نمونه ساخته شده دارای توان نامی 120 وات و ولتاژ ورودی بین 24 تا 50 ولت میباشد.
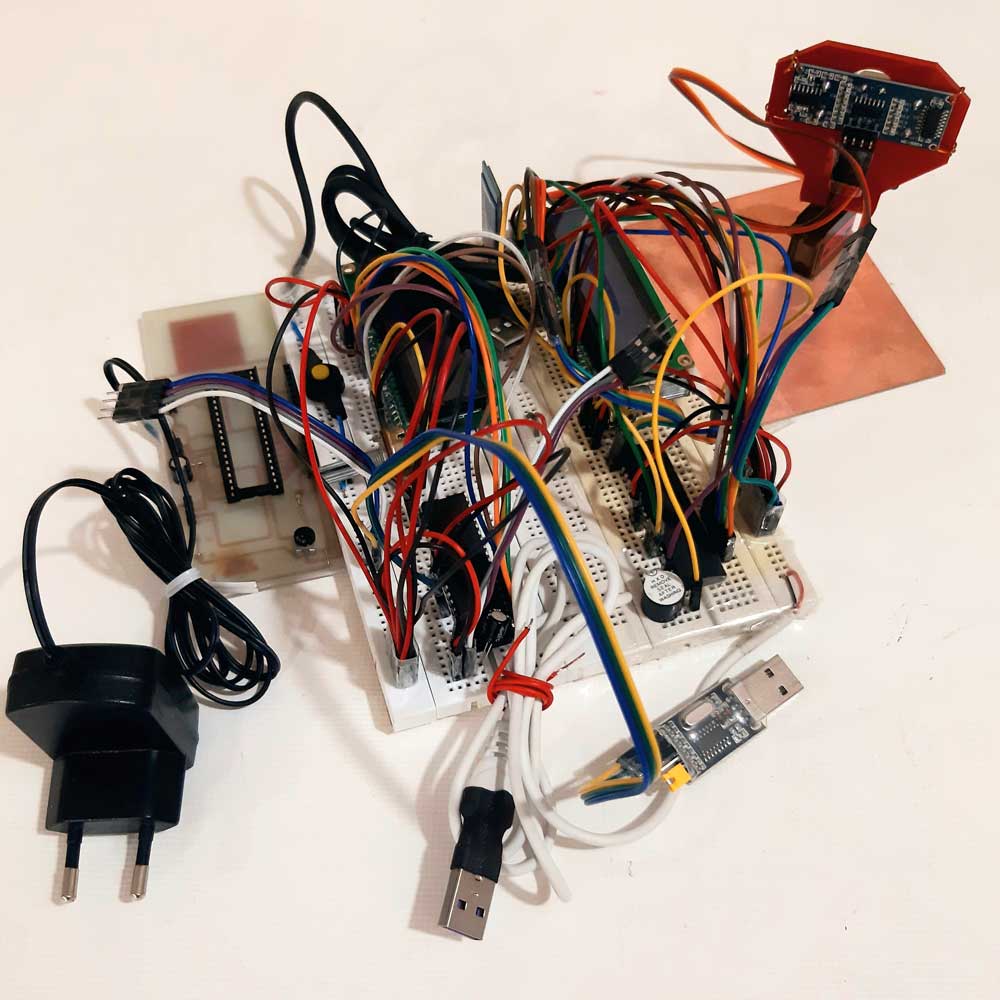
ساخت رادار آلتراسونیک با قابلیت مشخص نمودن ثابت یا متحرک بودن اشیاء، نمایش فاصله اشیاء و زاویه قرارگیری آن از رادار با ویژگی نمایش دادهها در کامپیوتر
ارائه دهنده :محمد فرهمند کاهریزی
استاد راهنما :دکتر عبدالله عباسی
توضیحات:
در پروژه از ماژول آلتراسونیک SFR04 برای تشخیص موانع از طریق ارسال و دریافت موج صوتی و از سرووموتور SG90S برای اسکن محیط با زاویه 180 درجه استفاده شده است. همچنین از یک lcd کاراکتری 2×16 برای نمایش اطلاعات شامل زاویه و فاصله اجسام شناسایی شده و از یک میکروکنترلر Atmega16 برای پردازش اطلاعات استفاده میشود. یکی از خصوصیات منحصر به فرد این پروژه قابل پایش بودن دادههای خروجی آن توسط کامپیوتر و اپلیکیشن اندرویدی است. به این صورت که اطلاعات با استفاده از مبدل USB به serial به کامپیوتر ارسال می شود و نرمافزار با پردازش آنها موقعیت جسم را درکامپایلر Processing با استفاده از محیط گرافیکی نوشته شده به زبان برنامه نویسی Java نمایش میدهد. این پروژه در نهایت چیزی شبیه یک رادار، ردیاب یا دستگاه سونار است.

اینورتر چند سطحی با قابلیت افزایش ولتاژ و بالانس ولتاژ خازن
ارائه دهنده :ناصر قربانی
استاد راهنما :دکتر امین اصغری
توضیحات:
- اینورتر وسیلهای است که ولتاژ مستقیم را به ولتاژ متناوب تبدیل میکند.
- بارزترین مزیتهای اینورترهای چند سطحی کم کردن THD، پایین آوردن تلفات و کاهش استرس کلیدهای قدرت میباشد.
- این ساختار قابلیت تولید یک شکل موج پلهای هفت سطحی با افزایش ۱/۵ برابری نسبت به سطح ولتاژ ورودی را دارد.
- مزیت این ساختار نسبت به ساختارهای مشابه تعداد المانها کمتر، سادگی مدار کنترلی و در نتیجه کاهش هزینه و پیچیدگی میباشد.
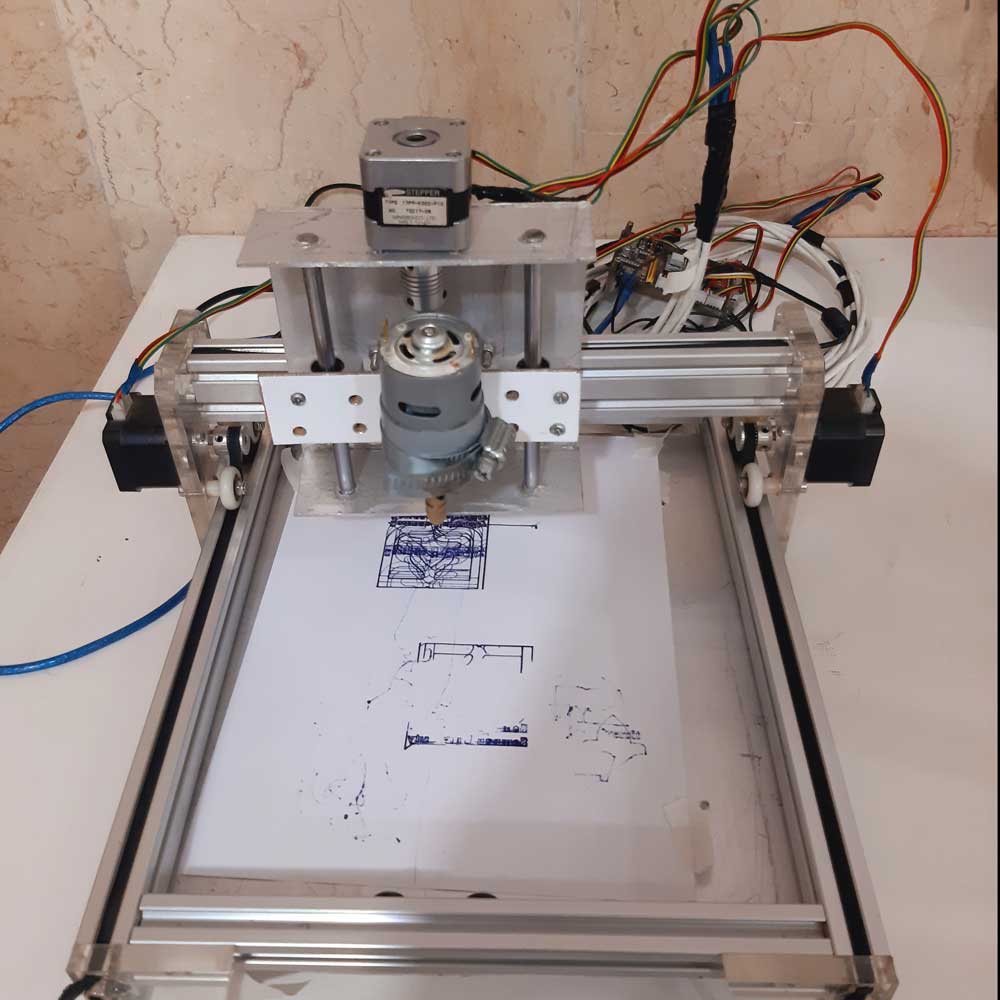
ساخت دستگاه CNC با قابلیت حکاکی و برش
ارائه دهنده :امیر حسین نیک خواه
استاد راهنما :دکتر حمید یعقوبی
توضیحات:
از جمله قابلیتهای این دستگاه به موارد زیر میتوان اشاره کرد
- درصد خطا در حد نانومتر
- بدون نیاز به پروگرمر
- حکاکی با لیزر روی چوب و چرم و برش فیبر مدار چاپی
- دارای سرعت بالا برای حکاکی
ربات آتشنشان
ارائه دهنده :امیرحسین اسدپوری
استاد راهنما :دکتر امین اصغری
توضیحات:
- امکان برنامهپذیری در نحوه خاموش کردن آتش
- امکان تشخیص فاصله شعله به روش دیجیتال بدون نیاز به سنسور آنالوگ
- توانایی یافتن آتش و اطفاء حریق به صورت خودکار
- مزیت این ربات، کوچک، قابل حمل بودن و عدم نیاز به تغذیه توان بالا میباشد.
ساخت رله اضافه جریان آنی با استفاده از آردوینو
ارائه دهنده :فرداد فریدون تبار
استاد راهنما :دکتر زهرا مروج
توضیحات:
در این پروژه تلاش شده با استفاده از ساختار رله اضافه جریان از تجهیزات در مقابل اضافه جریان حفاظت شود. بنابراین در ابتدا مقدار جریان AC اندازهگیری شده و در صورتیکه مقدار جریان از یک حد آستانهای افزایش پیدا کرد دستگاه شروع به هشدار کرده و با استفاده از یک اپتوکوپلر، جریان AC به وجود آمده را قطع میکند.

ماشین سنکرون شار محوری دو روتوره با چرخش روتورها در دو جهت مختلف
ارائه دهنده :الهام رحیمی
استاد راهنما :دکتر حمیدرضا ایزدفر
توضیحات:
- ماشینهای سنکرون با توجه به جهت حرکت شار در فاصله هوایی به سه گروه شار محوری، شار متقاطع و شار شعاعی تقسیم میشوند. ماشینهایی با دو روتور و یک استاتور، یکی از انواع ماشینهای سنکرون شار محوری میباشند. در این ساختار روتورها میتوانند هم جهت یا در دو جهت مختلف گردش کنند.
- از جمله مهمترین کاربردهای این ساختار در نیروی رانشی کشتیها و زیردریاییها، توربینهای بادی و صنایع نظامی است.
- از مزایای این ساختار میتوان به افزایش راندمان، چگالی توان بالاتر، قابلیت اطمینان بیشتر، امکان ساخت در داخل کشور با توجه به امکانات و تجهیزات موجود، لرزش و سر و صدای کم اشاره نمود.
- نمونه ساخته شده، یک ژنراتور با توان 63 وات و سرعتrpm 1000 میباشد.

ربات تعقیب کننده انسان به منظور شناسایی اختلال راه رفتن افراد مبتلا به ناتوانی حرکتی با استفاده از دوربین کینکت
ارائه دهنده :اسماعیل خالقی
استاد راهنما :دکتر هادی سلطانی زاده
توضیحات:
- اختلال در راه رفتن یک مشکل شایع در جامعه است که میتواند به عنوان یک آسیب، زندگی فرد را محدود کند. تشخیص صحیح و سریع این اختلالات میتواند به روند بهبود و درمان کمک کند.
- حسگر کینکت (نسخه دو) میتواند 25 نقطه از نقاط آناتومی بدن فرد را سه بعدی شناسایی کند. بیمار به شکل طبیعی شروع به راه رفتن میکند و این ربات پشت فرد بیمار حرکت میکند. مدل راه رفتن بیمار استخراج شده و ویژگیهای موردنظر محاسبه و برای تحلیل و بررسی ذخیره میگردد.
- هوش مصنوعی تعبیه شده در این سیستم نوع بیماری و شدت آن را تعیین نموده و طی نمودارهایی به بیمار و پزشک ارائه مینماید.

سیستم تولید برق هیبرید بادی - خورشیدی
ارائه دهنده :محمد مغربی
استاد راهنما :دکتر رضا کیپور
توضیحات:
این توربین بادی–خورشیدی با اعمال نیروی باد به پرههای توربین شروع به چرخیدن میکند و انرژی حرکتی توسط محور از توربین به گیربوکس و سپس به ژنراتور منتقل میشود. جنس پرهها از آلومینیوم میباشد. توربین از سه پره نازک به ابعاد ۱۳/۵×۵۵ سانتیمتر ساخته شده است. در صورت عدم وجود نیروی باد روی پرهها، پنل خورشیدی نصب شده از جنس پلیمری نسل جدید انتقال توان را انجام میدهد. برق تولیدی از پنلهای خورشیدی که از نوع dc میباشد به باتری و ترمز کنترل شارژر انتقال داده میشود. در ادامه بعد از کنترل شارژر به اینورتر که برق 12 ولت مستقیم را به 220 ولت غیرمستقیم تبدیل میکند وصل میشود و در خروجی اینورتر به مصرفکننده تحویل داده میشود. از موارد نوین این طراحی، قسمت جمع شده برج میباشد که قابلیت تغییر دارد.
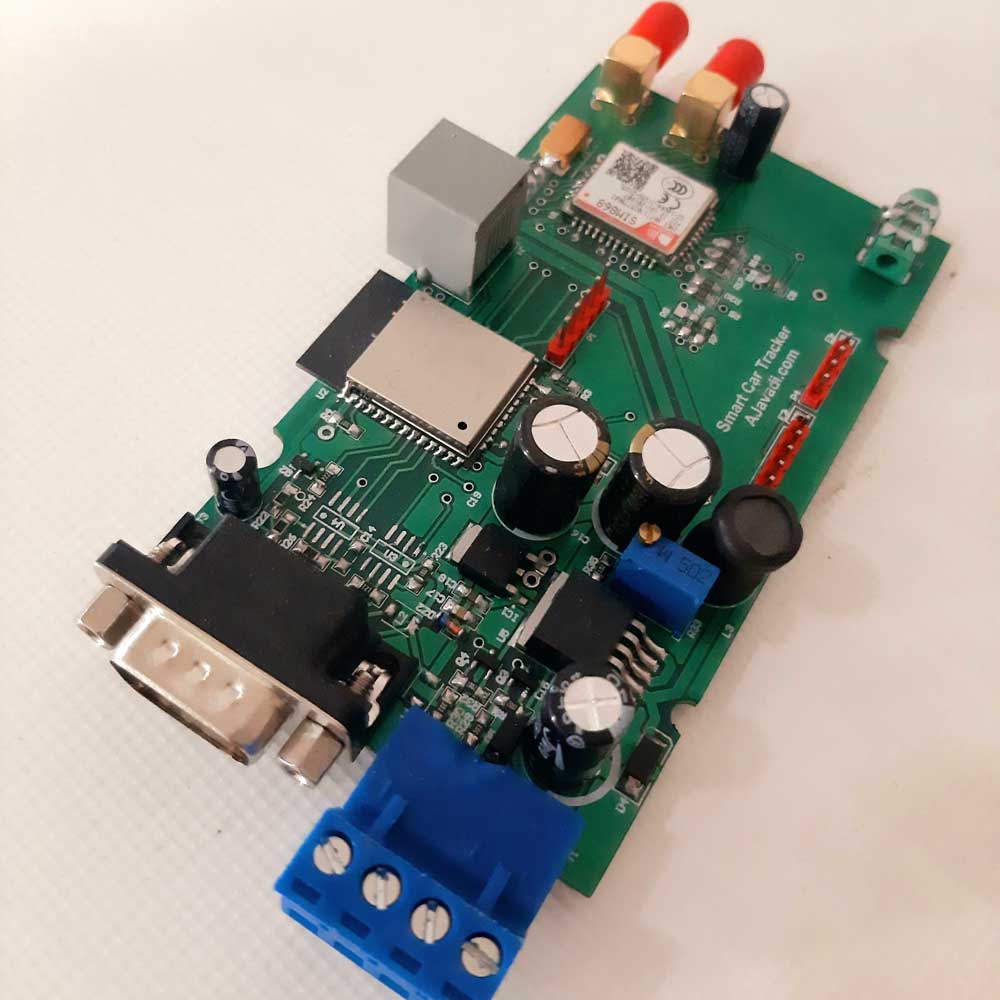
سیستم هشداردهنده پیشگیری از برخورد خودرو
ارائه دهنده :علی جوادی
استاد راهنما :دکتر شیث ابوالمعالی
توضیحات:
- این پروژه طراحی و ساخت مدار الکترونیکی سیستم پیشگیری از برخورد خودرو است.
- مکانیزم عملکرد دستگاه به این صورت است که باتوجه به سرعت لحظهای خودرو و بررسی فاصله با مانع پیشرو، در صورت عدم توجه به جلو توسط راننده و خطر برخورد خودرو با مانع مقابل، سیستم بوق هشدار را فعال کرده و راننده را متوجه خطر میسازد.
- درصورتیکه راننده به هشدار نیز بیتوجه باشد سیستم میتواند عمل ترمزگیری را در خودروهای مجهز به پدال ترمز برقی بهصورت خودکار انجام دهد.
- این سیستم بر اساس شتاب ترمز خودروهای مختلف قابل تنظیم است و از یادگیری تقویتی برای بهبود عملکرد خود استفاده میکند. از دیگر قابلیتهای این سیستم نمایشگر سرعت، کنترل دزدگیر خودرو، ردیابی خودرو، ارسال پیام در صورت وقوع تصادف و یا تجاوز از سرعت مجاز و... است.

اسیلاتور 10 کیلوهرتز
ارائه دهنده :زهرا موسوی
استاد راهنما :دکتر محمد لاری
توضیحات:
- این مدار با استفاده از دو انتگرالگیر، یک معادله دیفرانسیل خطی درجه 2 با ضرایب ثابت را حل میکند.
- پارامترهای معادله و مدار طوری تنظیم شده است که جواب همگن معادله دیفرانسیل به صورت پایدار و کسینوسی شود.
- مدار بدون داشتن ورودی و تنها با استفاده از نویز محیط، شروع به نوسان کرده و در نقش یک اسیلاتور، سیگنال کسینوسی تولید میکند.
- فرکانس نامی نوسان 10 کیلوهرتز است. با این حال با تغییر مقادیر پتاسیومترهای روی مدار، دامنه و فرکانس نوسان قابل تغییر است.

مبدل افزاینده – کاهنده (فلای بک) DC-DC سوئیچینگ با نسبت تبدیل بالا
ارائه دهنده :محمد علی زینعلی
استاد راهنما :دکتر اسکندریان
توضیحات:
مبدلهای فلایبک به عنوان مبدلهای برق dc به dc تعریف میشوند. مبدل فلایبک را میتوان گونهی ترانسفورماتوردار یا ایزولهی مبدل باک–بوست در نظر گرفت. این مبدلها در توانهای پایین حدود 20 تا 200 وات طراحی میگردند و به علت داشتن المانهای کم، در کاربردهایی چون منابع تغذیه سوییچینگ و سیستمهای فتوولتائیک به کار گرفته میشوند.
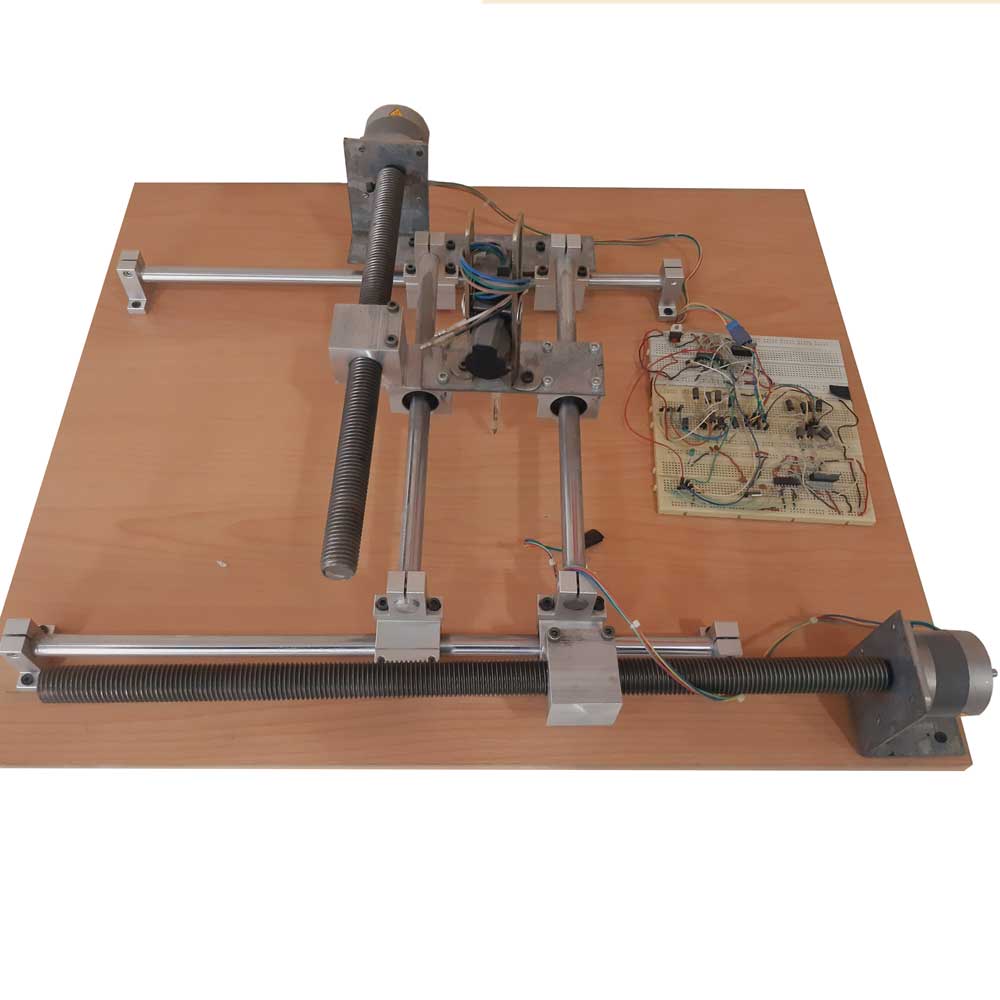
دستگاه CNC با کنترل کننده فازی برای بازوی دو درجه آزادی
ارائه دهنده :امید نظری
استاد راهنما :دکتر رضا کیپور
توضیحات:
هدف از ساخت CNC، جایگزینی ماشین کار با یک سیستم الکترونیکی است که کلیه کارهای انجام شده توسط ماشین کار را CNC عیناً انجام میدهد. این سیستمها به دو صورت مدار باز و مدار بسته ساخته میشوند. در حالت مدار باز، هیچ فیدبکی از خروجی به ورودی نداریم. لذا در این سیستمها عموماً از موتورهای پلهای به عنوان محرک استفاده میشود. مشخصه اصلی این موتورها این است که با اعمال پالس به ترمینالهای آن موقعیت شفت یا محور موتور به میزان مشخص و از پیش تعیین شدهای دوران میکند. هر پالس به میزان مشخصی زاویه محور را تغییر میدهد. در این نمونه ساخته شده، تمرکز اصلی بر کنترل مختصات x و y دستگاه CNC با استفاده از کامپیوتر بوده و روش کنترلی پیادهسازی شده در کامپیوتر، کنترل فازی است. در نمونه ساخته شده، به جای تیغه تراش CNC یک خودکار قرار داده شده است تا شکلهای دو بعدی ارسالی توسط کامپیوتر را به جای برش ترسیم کند.

جهتیابی صوتی با استفاده از آرایه میکروفونی
ارائه دهندگان :امیرحسین احمدیان و مرتضی عالم رجبی
استاد راهنما :دکتر حمید مقدادی
توضیحات:
جهتیابی منبع صوت با تحلیل سیگنالهای دریافت شده از آرایه میکروفونی، یک موضوع تحقیقاتی مهم است که در زمینههایی چون رباتیک و تجهیزات نظامی و امنیتی کاربرد دارد. سیستم ارائه شده از قابلیت تخمین جهت منبع صوت در یک صفحه (با استفاده از سه میکروفون) برخوردار بوده و بر اساس الگوریتم مکانیابی یک مرحلهای (شکلدهی پرتو) و محاسبه کرولاسیون بین سیگنالها و نوع تعمیم یافته آن عمل میکند. الگوریتمها با کدنویسی در نرمافزار متلب پیادهسازی شدهاند و روی یک کامپیوتر شخصی معمولی قابل اجرا هستند.

سیستم پمپاژ آب خورشیدی
ارائه دهنده :حسین مؤمنی
استاد راهنما :دکتر رضا کیپور
توضیحات:
- یکی از اقتصادیترین و پرکاربردترین کاربردهای سیستمهای فتوولتائیک، پمپاژ آب در مناطق دور از شبکه میباشد. همه سیستمهای پمپاژ آب خورشیدی شامل آرایههای PV، ساختار نگهدارنده، موتور پمپ، مخزن آب، پنل کنترل و حفاظت میباشند.
- در این نمونه آزمایشگاهی از یک پمپ DC با توان 45 وات استفاده شده است که آب را از منبع پایین به منبع بالایی پمپ میکند. چندین سنسور نیز به منظور کنترل سطح آب استفاده شدهاند. از اهداف ساخت این نمونه، تکمیل تجهیزات مجموعه آزمایشگاهی و آموزشی سیستمهای فتوولتائیک بوده است.

انتقال برق بیسیم
ارائه دهنده :حسین کشتکار
استاد راهنما :دکتر محمد لاری
توضیحات:
این دستگاه برق 220 ولت شهری را دریافت نموده و پس از تغییر فرکانس آن به حدود 400 کیلوهرتز، آن را با استفاده از یک حلقه به عنوان آنتن فرستنده ارسال میکند. در گیرنده هم یک حلقه به عنوان آنتن گیرنده توان ارسالی را دریافت کرده و پس از یکسوسازی آن، جهت روشن کردن یک لامپ از آن استفاده میکند.
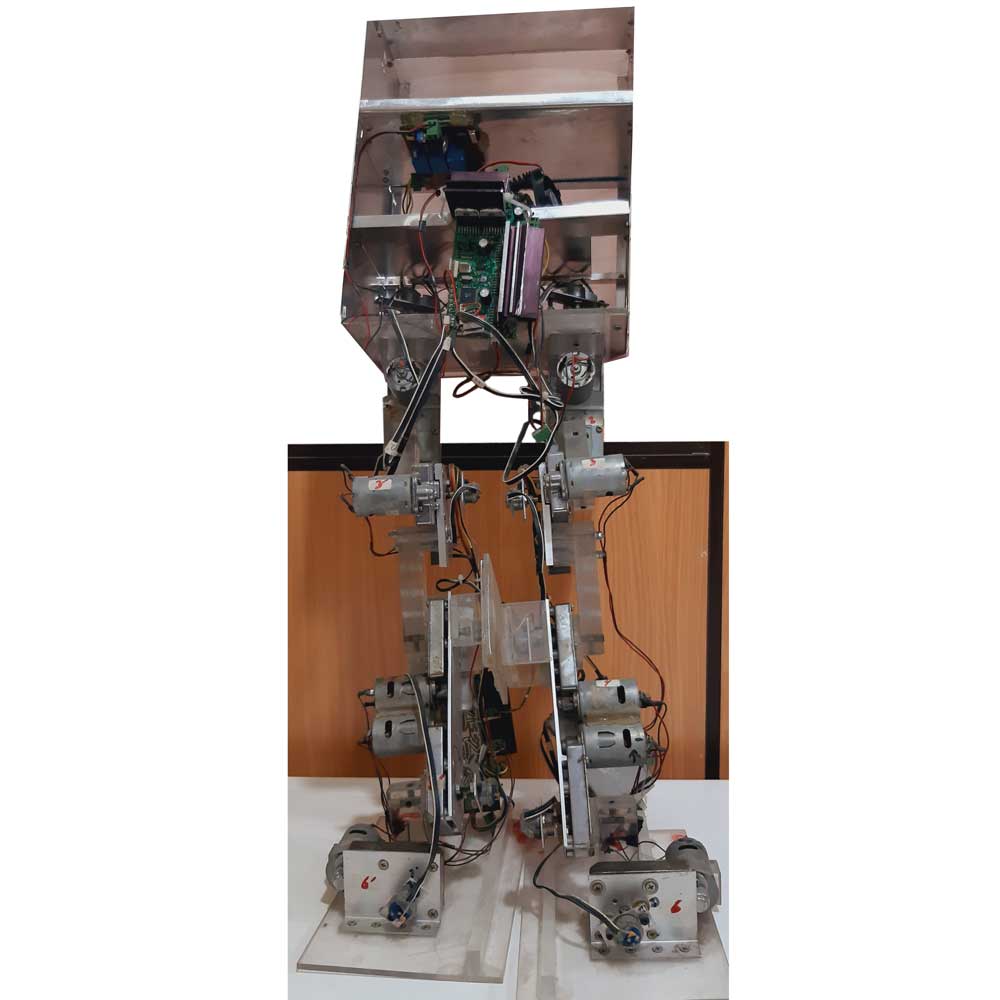
ربات انسان نما
ارائه دهنده :وحید هاشمی
استاد راهنما :دکتر ناصر اسکندریان
توضیحات:
- این ربات قادر است برخی حرکات و فعالیتهای انسان از قبیل راه رفتن و چرخیدن به طرفین را انجام دهد.
- همچنین توانایی دریافت، تشخیص و اجرای برخی دستورات دیداری مانند حرکات پانتومیم اشاره به چپ و اشاره به راست و نیز برخی دستورات شنیداری مانند دستور به جلو رفتن و ایستادن را دارد.
- در این ربات به جای بهکارگیری موتورهای سرو، از موتورهای dc استفاده شده است.
- در بحث کنترل و ناوبری ربات نیز از سنسورهای سنجش سرعت زاویهای و سنجش شتاب خطی استفاده شده است که یکی از عوامل ساده کردن معادلات دینامیکی لازم برای ناوبری سیستم میباشد.
تاریخ آخرین بروزرسانی:
1402/03/21 - 16:45:40